An Interaction-Aware, Perceptual Model For Non-Linear Elastic Objects
ACM Transactions on Graphics, 2016.
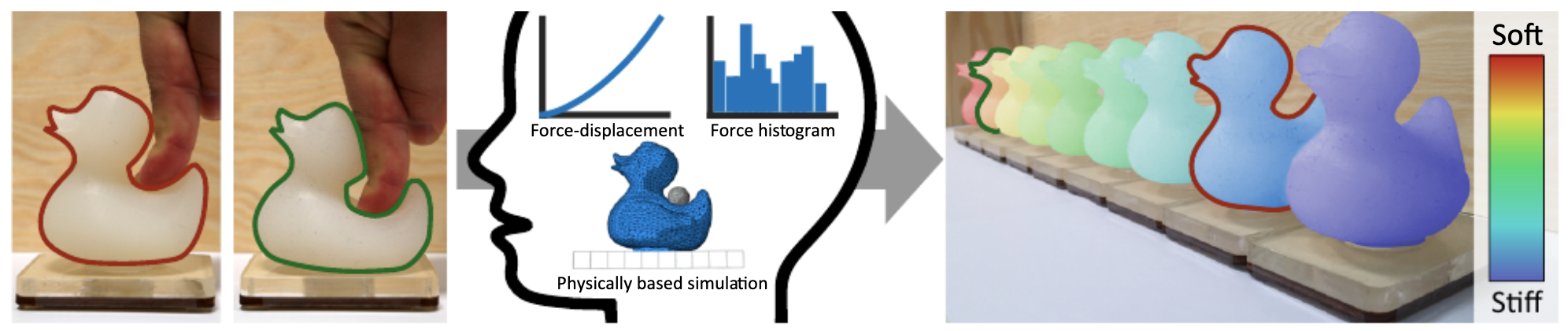
Everyone, from a shopper buying shoes to a doctor palpating a growth, uses their sense of touch to learn about the world. 3D printing is a powerful technology because it gives us the ability to control the haptic impression an object creates. This is critical for both replicating existing, real-world constructs and designing novel ones. However, each 3D printer has different capabilities and supports different materials, leaving us to ask: How can we best replicate a given haptic result on a particular output device? In this work, we address the problem of mapping a real-world material to its nearest 3D printable counterpart by constructing a perceptual model for the compliance of nonlinearly elastic objects. We begin by building a perceptual space from experimentally obtained user comparisons of twelve 3D-printed metamaterials. By comparing this space to a number of hypothetical computational models, we identify those that can be used to accurately and efficiently evaluate human-perceived differences in nonlinear stiffness. Furthermore, we demonstrate how such models can be applied to complex geometries in an interaction-aware way where the compliance is influenced not only by the material properties from which the object is made but also its geometry. We demonstrate several applications of our method in the context of fabrication and evaluate them in a series of user experiments.